Autonome Unterstützung: Arm-Roboter im Einsatz
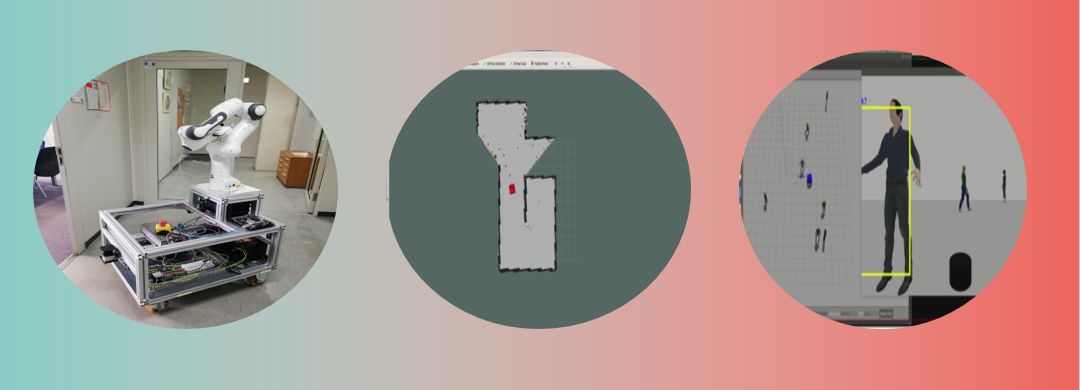
Am Lehrstuhl für Entwicklung regelungstheoretischer Methoden und Verfahren arbeitet zurzeit ein dreiköpfiges Team an der Entwicklung eines Arm-Roboters. „Dieser soll zukünftig z. B. für den autonomen Transport in Logistikzentren oder Werkstätten eingesetzt werden“, so Xiang Chen, wissenschaftlicher Mitarbeiter. Statt einer zentralen Steuerungseinheit soll der Roboter seine Aufgabe selbstständig planen und sich bewegen, damit der Transportfluss optimiert wird. Dazu wird der mobile Transportroboter entwickelt, der aus zwei Hauptteilen besteht. Diese sind zum einen der Roboterarm „Franka Emika Panda“. Er wurde für eine sichere Mensch-Roboter-Interaktion konzipiert. Der zweite Teil des Transportroboters bildet die mobile Plattform.
Die Plattform und der Roboterarm sind gesteuert von einem Industrie-PC, der in die Plattform integriert wird. Der PC wiederum ist gefüttert mit einem Bildverarbeitungsboard, das die Sensorsignale kombiniert und die aktuellen Koordinaten sowie die Information der Hindernisse in der nahen Umgebung zur Verfügung stellt. Um auch die autonome Navigation im Indoor-Bereich zu ermöglichen, wird auf eine Lösung von mehreren Sensoren zurückgegriffen. Dabei wird überwiegend auf die Ultra-Wideband-Technologie (UWT) gesetzt, da sie ähnlich wie das im Outdoor-Bereich eingesetzte GPS funktioniert. Drei solcher UWB-Basisstation werden hierfür im Raum installiert, die UWB-Signale mit den mobilen Geräten austauschen. Anhand der Information der Ankunftszeit kann der Roboter seine Koordinaten berechnen. Um reibungslose Ortungsergebnisse zu bekommen werden die UWB-Signale mit den Signalen aus dem Intertial Measurement Unit (IMU)-Sensor kombiniert, der eine noch höhere Abtastfrequenz besitzt.
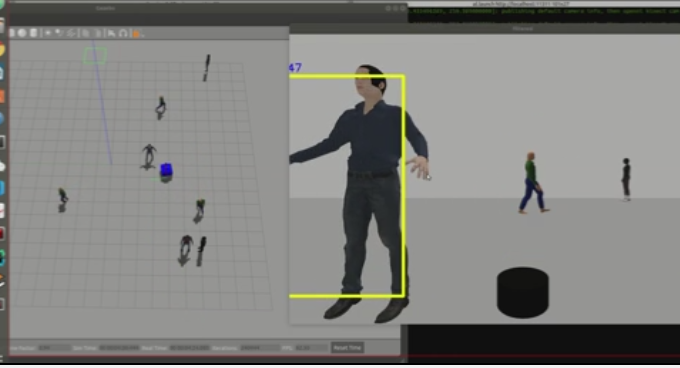
Mithilfe einer Kamera und einem Laserscanner kann der Roboter Menschen und Hindernisse in seiner Umgebung erkennen und Objekte erfassen um diese greifen zu können. Dazu werden Bildverarbeitungsalgorithmen verwendet.
Xiang Chen bestätigt: „zukünftig ist es denkbar, dass mehrere Roboter miteinander kommunizieren können, denn aufgrund der Zusammenarbeit von Roboterarm sowie der mobilen Plattform könnte der Roboter in vielfältigen Szenarien eingesetzt werden.“ In Produktionsstätten könnte er beispielsweise autonom Zwischenprodukte zwischen den einzelnen Produktionsorten transportieren. Der Roboterarm erweitert die Fähigkeit des Roboters, sodass er kompliziertere Aufgaben erledigen kann, z.B. wird der Roboter selbstständig ein Werkzeug abholen und zu einem Mitarbeiter bringen. Daran arbeiten die Wissenschafler auch weiterhin. Wenn Sie Fragen zu dieser Technologie haben sprechen Sie uns gerne an.
Ansprechpartner
Xiang Chen
E-Mail: chen@eit.uni-kl.de